
ROS Indigo Igloo Preinstalled Virtual Machine

Usually, we issue a Virtual Machine (VM) with ROS preinstalled for each ROS release. This time, we decided to issue two VMs for ROS Indigo: a 32 bits version and a 64 bits one. Depending on the amount of resources you are willing to allocate to the virtual machine, you pick one version or the other. The 32bits variant requires only 1GB RAM and 1 CPU core. The 64 bits VM targets hosts with more resources. It is set to use 3GB RAM and 2 CPU cores.
Both VMs are provided with VirtualBox extension pack pre-installed too. This enables copy/paste as well as drag’n drop both bidirectional. So, you can share clipboard and easily exchange files between the VM to the host OS. The summary of the VM settings are provided by Table 1 below. Note that all these parameters and others can be changed in the settings of your VM once you have installed it from one of the .OVA archives we provide. Please share with the ROS community settings that best worked for you.
The VMs have preinstalled the ROS desktop-full configuration. Beside ROS core libraries, they include rqt the Qt-based framework for GUI development for ROS, rviz the 3D visualization tool for ROS, robot-generic libraries, 2D/3D perception libraries, navigation libraries as well as 2D and 3D simulators. Speaking of 3D simulator, this configuration includes version 2 of Gazebo which is the recommended version for Ubuntu 14.04. Nevertheless, there are instructions if you need to upgrade to Gazebo 3 series.
The installation of the .ova file is can be done using the “import appliance…” menu of VirtualBox, as we have explained for previous ROS virtualizations. Remember that the .ova file complies with the Open Virtualization Format (OVF), thus it can be used with other virtualization tools such as VmWare.
We set Unbuntu to automatically log in with the unique admin user account:
- login: viki
- password: viki
The login is a reference to the V.I.K.I character from the I, Robot movie. It stands for Virtual Interactive Kinetic Intelligence, which is the AI that controls the building of the international robot company: United States Robots (U.S.R). To remain compatible with our tutorial on ROS networking, we have named of the machine C3PO after the famous humanoid robot from Star Wars.
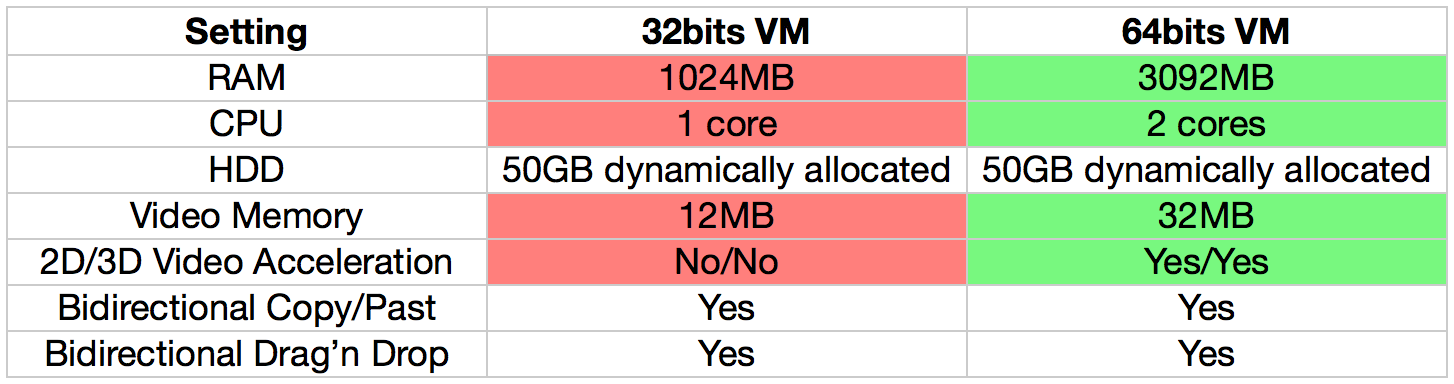
Table 1: Default VM Settings
29 Comments
Hi, I’ve downloaded the virtual machine with Indigo. I can run it and see the grub but then it stucks at a black screen and Ubuntu doesn’t start.
Do you know why can it be? I had no problems using ROS hydro virtual machine
Hello, try to change your virtual machine settings to “Ubuntu (64-bit)”. It fixed it for me. If you’re using Virtualbox, press the Settings button, and under the General tab you’ll have a “Version” dropdown and you can select it there.
I am getting following error, when i am trying to import RosIndigo32Bits.ova in virtualbox.
……
Failed to import appliance: \User\ghumato\Desktop\RosIndigo32Bits.ova.
Could not create the imported medium:D:\
VM\C3PO\RosIndigo32Bits-disk1.vmdk. (VERR_VD_VMDK_INVALID_FORMAT)
Result Code:
VBOX_E_FILE_ERROR (0x80BB0004)
Component:
Appliance
Interface:
IAppliance {3059cf9e-25c7-4f0b-9fa5-3c42e441670b}
……
Specifications of my computer is
Operating system: windows 7 32 bit.
C drive space available: 35 GB.
Virtualbox: 4.3.16
Awesome :) it worked !! I changed the virtual machine config to remove usb 2.0 support because apparently it gaves me an error, and I activated the 2D and 3D host acceleration that makes the turtlesim produces a much smoother simulation and movements.
downloaded and run indigo 32 bit VM. The VM starts and I see Umbuntu screen, then somthing about BIOS upgrade and then a Nootrix grafic screen but it stops there. I bumped the memory up but no change. No sure where to even start as new to VM’s.
System is HP probook, win 7 64 bit, 4gb ram. Any ideas welcome. Thanks
I am facing Same issue. Can any one help pls.
See new HTTP link on the download page. It’s slower than the torrent but should work behind firewalls.
Have downloaded and ran VM Ros Indigo on VMWARE Player 6 and 7. Started “roscore” and was OK. Did try to run “rosrun turtlesim turtlesin_node” but nothing happens…(note: I am not a linux guy) What do I miss here…?
you seem to have a typo in your command line “turtlesim_node”. More in our tutorial http://nootrix.com/2012/12/getting-started-ros/
When I try to start Indigo Igloo 64 bit in VM box I get the following error (note – I have checked my bios and VM is turned on. Any ideas on how I can fix this problem? I am running an Intel I7-4510 windows 8.1 system. Thanks for your help.
Failed to open a session for the virtual machine RosIndigo64Bits.
VT-x is not available. (VERR_VMX_NO_VMX).
Result Code: E_FAIL (0x80004005)
Component: Console
Interface: IConsole {8ab7c520-2442-4b66-8d74-4ff1e195d2b6}
downloaded and run indigo 32 bit VM.
Installed ROS Indigo Igloo 64bit on VM.
It worked well.
There was a lot of updates.
After the updates, black screen
Will try some of the other distribution and report.
Bent Karlsen
Hi, i installed ROS indigo, i m using OpenCV do some visual computing. But i could not use the Webcam neither with OpenCV neither with sont site on web. It’s seem to be not detected. Someone know where i can find tuto or information about that ? or does someones already had this problem ?
Thanks for your answer
i am trying to run gazebo SIM..
i turned on 3D on Vbox
i am using 32bit
but i get this error
OpenGL Warning: glIsFenceNV not found in mesa table
OpenGL Warning: glSetFenceNV not found in mesa table
OpenGL Warning: glTestFenceNV not found in mesa table
libGL error: core dri or dri2 extension not found
libGL error: failed to load driver: vboxvideo
Any luck in running gazebo on VM?
Run the following command:
export LIBGL_ALWAYS_SOFTWARE=1
and then run Gazebo or RVIZ
I downloaded ROS Indigo Igloo 64bit and imported on virtual box. But it didn’t start and it showed following error:
Failed to open a session for the virtual machine RosIndigo64Bits.
Unable to load R3 module C:\Program Files\Oracle\VirtualBox/VBoxDD.DLL (VBoxDD): GetLastError=1790 (VERR_UNRESOLVED_ERROR).
Result Code: E_FAIL (0x80004005)
Component: Console
Interface: IConsole {8ab7c520-2442-4b66-8d74-4ff1e195d2b6}
What should I do?
I downloaded 32 bit vm and tried to run on a virtualBox but it produced following error:
Failed to open a session for the virtual machine RosIndigo32Bits.
Unable to load R3 module C:\Program Files\Oracle\VirtualBox/VBoxDD.DLL (VBoxDD): GetLastError=1790 (VERR_UNRESOLVED_ERROR).
Result Code: E_FAIL (0x80004005)
Component: Console
Interface: IConsole {8ab7c520-2442-4b66-8d74-4ff1e195d2b6}
Then I downloaded 64 bit and tried to run but it produced same error. What I should do?
Hi, are there direct download links for this? I’m in a position where torrent is strictly restricted by the university.
Please help, I’m Getting this error:
Could not create the imported medium ‘C:\Users\Sam\VirtualBox VMs\RosIndigo32Bits\RosIndigo32Bits-disk1.vmdk’ (VERR_VD_VMDK_INVALID_FORMAT).
Result Code:
VBOX_E_FILE_ERROR (0x80BB0004)
Component:
ApplianceWrap
Interface:
IAppliance {8398f026-4add-4474-5bc3-2f9f2140b23e}
Hi Sam..
Now I’m facing the same problem..
Did you find the solution of this error?
Hi,
I’m facing same error on 32-bit version although 64-bit version works on first try. Any of you solved the problem?
Failed to open a session for the virtual machine RosIndigo64Bits.
VT-x is disabled in the BIOS for all CPU modes (VERR_VMX_MSR_ALL_VMX_DISABLED).
Result Code: E_FAIL (0x80004005)
Component: ConsoleWrap
Interface: IConsole {872da645-4a9b-1727-bee2-5585105b9eed}
viki@xx-ros-workstation:~$ roslaunch turtlebot_rviz_launchers view_robot.launch
[view_robot.launch] is neither a launch file in package [turtlebot_rviz_launchers] nor is [turtlebot_rviz_launchers] a launch file name
The traceback for the exception was written to the log file
Traceback (most recent call last):
File “/opt/ros/indigo/bin/roslaunch”, line 35, in
roslaunch.main()
File “/opt/ros/indigo/lib/python2.7/dist-packages/roslaunch/__init__.py”, line 308, in main
logger.error(traceback.format_exc())
UnboundLocalError: local variable ‘logger’ referenced before assignment
seems like rviz install is missing, can you help how to install it ?
viki@c3po:~$ roslaunch gazebo_worlds empty_world.lauch
[empty_world.lauch] is neither a launch file in package [gazebo_worlds] nor is [gazebo_worlds] a launch file name
The traceback for the exception was written to the log file
Traceback (most recent call last):
File “/opt/ros/indigo/bin/roslaunch”, line 35, in
roslaunch.main()
File “/opt/ros/indigo/lib/python2.7/dist-packages/roslaunch/__init__.py”, line 308, in main
logger.error(traceback.format_exc())
UnboundLocalError: local variable ‘logger’ referenced before assignment
导入虚拟电脑 D:\ROS\RosIndigo64Bits.ova失败.
Could not create the imported medium ‘C:\Users\Administrator\VirtualBox VMs\RosIndigo64Bits\RosIndigo64Bits-disk1.vmdk’ (VERR_ZIP_ERROR).
返回 代码:VBOX_E_FILE_ERROR (0x80BB0004)
组件:ApplianceWrap
界面:IAppliance {8398f026-4add-4474-5bc3-2f9f2140b23e}
Could anyone help me with this problem? When I’m trying to import the .ova file, the following error occured:
D:\Program Files\RosIndigo64Bits.ova
Could not create the imported medium ‘C:\Users\Xu Enke\VirtualBox VMs\RosIndigo64Bits\RosIndigo64Bits-disk1.vmdk’.
VMDK: Compressed image is corrupted ‘C:\Users\Xu Enke\RosIndigo64Bits-disk1.vmdk’ (VERR_ZIP_CORRUPTED).
VBOX_E_FILE_ERROR (0x80BB0004)
ApplianceWrap
IAppliance {8398f026-4add-4474-5bc3-2f9f2140b23e}
Thank you very much.